Postingan ini membahas kumpulan rumus dinamika rotasi seperti rumus momen gaya, momen inersia, momentum sudut, energi kinetik rotasi, dan energi kinetik rotasi yang disertai dengan keterangan simbol.
Rumus momen gaya
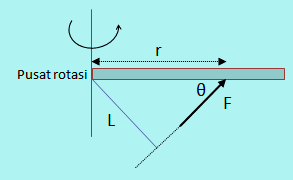
→ τ = F . r . sin θ
Keterangan simbol:
- τ = Momen gaya atau torsi (Nm)
- F = gaya (N)
- L = lengan gaya (m)
- r = panjang batang di ukur dari pusat rotasi hingga ujung/ pangkal gaya (m).
- θ = sudut antara gaya dengan lengan gaya.
Jika pada benda bekerja n buah gaya maka rumus momen gaya sebagai berikut:
→ ∑ τ = τ1 + τ2 + τ3 + … + τn→ ∑ τ = F1 . L1 + F2 . L2 + F3 . L3 + … + Fn . Ln
Rumus momen inersia partikel
→ I = m . r2Keterangan simbol:
- I = momen inersia (kg.m2)
- m = massa partikel (kg)
- r = jarak partikel ke sumbu rotasi (m)
Rumus momen inersia sistem partikel
→ ∑ I = I1 + I2 + I3 + … + In→ ∑ I = m1 . r12 + m2 . r22 + m3 . r32 + … + mn . rn2
Keterangan:
- I = momen inersia partikel 1, 2, 3, n (kg.m2)
- m1, m2, m3, mn = massa partikel 1, 2, 3, n (kg)
- r1, r2, r3, rn = jarak partikel 1, 2, 3, n ke pusat rotasi (m)
Rumus momen inersia silinder berongga poros di sumbu
→ I = m . R2Rumus momen inersia silinder pejal poros disumbu
→ I =1
2
m . R2
Keterangan:
- I = momen inersia (kg.m2)
- m = massa silinder (kg)
- R = jari-jari silinder (m)
Rumus momen inersia batang tipis poros disalah satu ujung
→ I =1
3
M . L2
Rumus momen inersia batang tipis poros di tengah
→ I =1
12
M . L2
Keterangan:
- M = massa batang (kg)
- L = panjang batang (m)
Rumus momen inersia bola tipis poros di diameter
→ I =2
3
M . R2
Rumus momen inersia bola pejal poros di diameter
→ I =2
5
M . R2
Keterangan:
- M = massa bola (kg)
- R = jari-jari bola (m)
Hukum II Newton rotasi
→ ∑ τ = I . αKeterangan:
- τ = torsi (Nm)
- I = momen inersia
- α = percepatan sudut (rad/s2 )
Rumus momentum sudut
→ L = I . ωKeterangan:
- L = momentum sudut (kg.m2 .s-1 )
- I = momen inersia (kg.m2 )
- ω = kecepatan sudut (rad/s)
Rumus hukum kekekalan momentum sudut
→ L1 = L2→ I1 . ω1 = I2 . ω2
Rumus energi kinetik rotasi
→ Ek =1
2
. I . ω2
Rumus energi kinetik menggelinding
→ Ek =1
2
. m . v2
+
1
2
. I . ω2
Keterangan:
- Ek = energi kinetik (joule)
- m = massa (kg)
- I = momen inersia (kg.m2 )
- v = kecepatan linear (m/s)
- ω = kecepatan sudut (rad/s)
Rumus pusat massa
→ Xpm =x1 . m1 + x2 . m2 + x3 . m3 + … + xn . mn
m1 + m2 + m3 + … + mn
→ Ypm =
y1 . m1 + y2 . m2 + y3 . m3 + … + yn . mn
m1 + m2 + m3 + … + mn
Keterangan:
- Xpm = pusat massa di sumbu X (kg)
- Ypm = pusat massa di sumbu Y (kg)
- m1, m2, m3, mn = massa partikel 1, 2, 3, n (kg)
- x1, x2, x3, xn = titik koordinat x partikel 1, 2, 3, n.
- y1, y2, y3, yn = titik koordinat y partikel 1, 2, 3, n.
Rumus titik berat bidang homogen
Bidang satu dimensi
→ Xw =x1 . L1 + x2 . L2 + x3 . L3 + … + xn . Ln
L1 + L2 +
L3 + … + Ln
→ Yw =
y1 . L1 + y2 . L2 + y3 . L3 + … + yn . Ln
L1 + L2 + L3 + … + Ln
Bidang dua dimensi
→ Xw =x1 . A1 + x2 . A2 + x3 . A3 + … + xn . An
A1 + A2 +
A3 + … + An
→ Yw =
y1 . A1 + y2 . A2 + y3 . A3 + … + yn . An
A1 + A2 + A3 + … + An
Bidang tiga dimensi
→ Xw =x1 . V1 + x2 . V2 + x3 . V3 + … + xn . Vn
V1 + V2 +
V3 + … + Vn
→ Yw =
y1 . V1 + y2 . V2 + y3 . V3 + … + yn . Vn
V1 + V2 + V3 + … + Vn
Keterangan:
- L1, L2, L3 = Panjang benda 1, 2, 3.
- A1, A2, A3 = luas bidang 1, 2, 3.
- V1, V2, V3 = volume benda 1, 2, 3.
Syarat kesetimbangan statis benda tegar
- Στ = 0
- ∑F = 0